SMAVE
VIRTUAL SYSTEM
針對虛擬目標機定義與配置、數據激勵與采集、 測試用例的設計、管理與執行、軟件
代碼的開發與調試等需求,提供一體化的設計驗證支持
ACEphere Motion Control
除了邏輯程序之外,許多機器和工廠需要一個通用的控制器來控制運動序列。由于現代處理器平臺的高性能,運動控制和機器人任務可以在與邏輯控制相同的設備上處理。借助ACEPHERE的開放架構,可以連接甚至集成用于運動規劃和控制的外部工程工具。
SMAVE Virtual System可無縫集成硬件使用人員和軟件開發人員對于虛擬目標機定義與配置、數據激勵與采集、 測試用例的設計、管理與執行、軟件代碼的開發與調試等需求,提供一體化的設計驗證支持,可實現針對目標系統的目標碼、源代碼覆蓋率統計分析及軟件性能分析;通過靈活的設備模型配置,可滿足不同的系統應用場景。
ACEphere Motion Control使得 運動控制更加簡單
邏輯和運動控制只需要一個單一的硬件設備,兩個應用程序組件可以用一個和相同的開發系統來設計。與傳統系統相比,一致的操作結構使得運動任務的工程更加容易和靈活。
ACEphere Motion Control
使用ACEphere Motion Control可以實現從單軸運動到多維數控路徑插補和機器人控制,用戶可以在熟悉的開發界面中為邏輯控制器實現各種運動控制任務。ACEphere Motion Control在ACEPHERE開發環境中以開發工具包的形式提供運動控制功能。在ACEPHERE環境中,可以用IEC 61131-3語言甚至Simulink模型工具解決任何復雜的任務。
理想的運動控制平臺
ACEPHERE可為運動控制提供所有核心功能
■ 集成運動庫的設計依賴于動態且易于使用的運動控制功能
■ 用于各種處理器平臺的集成編譯器,使跨系統部署的產品無需額外定制
■ 集成現場總線支持,使驅動器和I/O組件的配置更加便利
■ 從驅動和總線系統中提取運動工程,基于IEC 61131-3數據結構后,將非常適合仿真、測試、調試以及機械結構的改進
■ 設備制造商易于集成額外的配置和規劃工具,例如運動編輯器或特定驅動器,可將所有工程組件完全集成
■ 集成可視化簡化了仿真、測試和調試,可一體化完成所有工作而不需要其他的額外組件
控制功能
伺服驅動器
■ 運動控制器周期的為伺服驅動器提供軌跡基
■ 驅動采用伺服驅動控制
步進驅動器
■ 運動控制器通過脈沖/方向接口控制步進驅動器
■ 脈沖計數器向運動控制器報告位置
■ 完成運動控制器中的位置控制
變頻器
■ 運動控制器指定變頻器的期望轉速
■ 傳感器,如旋轉編碼器,報告位置
■ 運動控制器中的位置控制
運動學軸組
■ 運動控制器為軸組伺服驅動提供目標點和軸動力學約束
■ 驅動采用伺服驅動控制
ACEphere Motion Control優勢
機器人應用程序的通用實現
使用軸組參數配置和運動控制功能塊來進行
沒有固定的限制
軸的數量和更新頻率僅依賴于控制器的計算能力、內存大小以及使用的總線類型,可完全軟件定義
運動控制的編程不依賴于驅動
驅動改變不影響既有軟件
可移植到不同平臺
使用IEC 61131-3語言創建運動控制庫和應用程序ACEPHERE能夠為不同的目標系統編譯運動控制程序
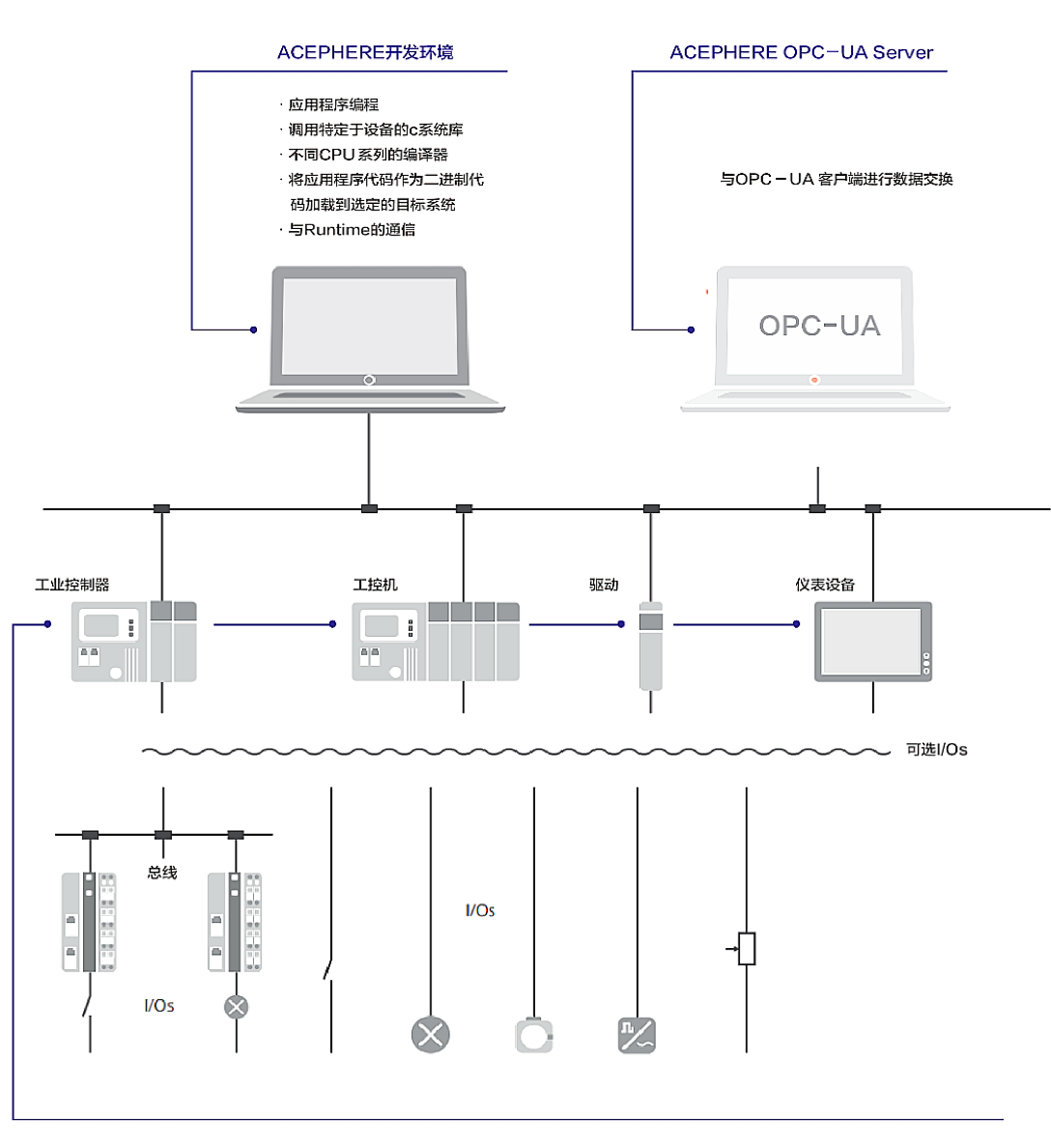
ACEPHERE開發環境集成
使用同一套工具和硬件可以實現邏輯應用、運動控制應用,從而降低成本
設備制造商與用戶的應用
設備制造商使用ACEPHERE來提供各種類型的可編程設備,從而為用戶提供完整的自動化系統。通過ACEPHERE自動化平臺,設備制造商可以定制包括功能庫、應用程序模板以及自己的組件,從而能夠用ACEPHERE實現針對特定設備或應用程序的開發系統。
ACEphere Motion Control 的使用
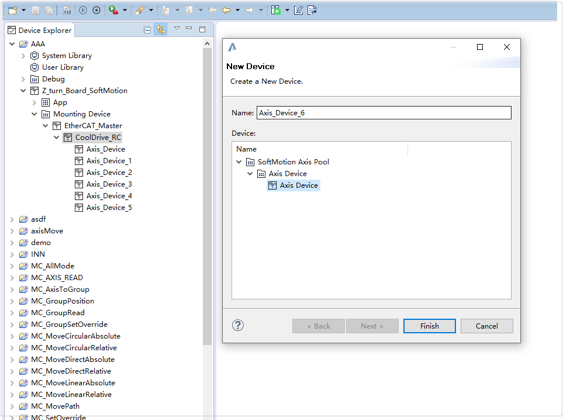
驅動器的配置和調試
■ 為ACEPHERE項目添加必要的總線系統:支持CANopen、EtherCAT,以及其它標準系統,如步進驅動器和模擬控制驅動器
■ 可自行添加需要的驅動器
■ 設備名稱表示隱式提供的設備描述文件,為每個驅動器抽象數據,允許驅動器和驅動器總線之間進行無縫數據交換
■ 通過設備的對象目錄配置總線和驅動器特定的參數
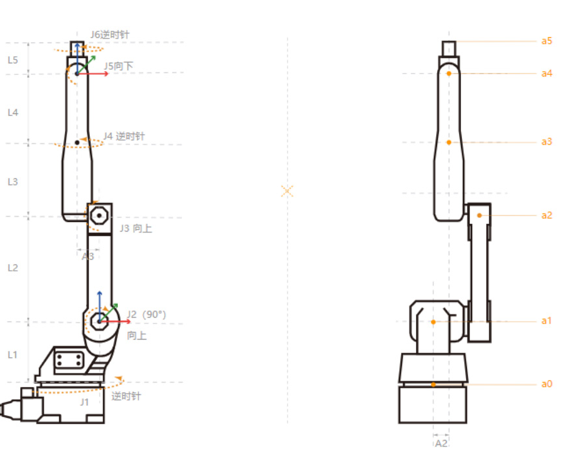
點到點和連續路徑運動的機器人應用
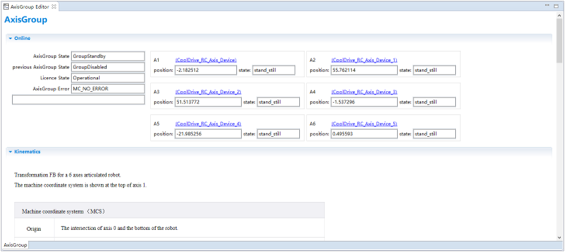
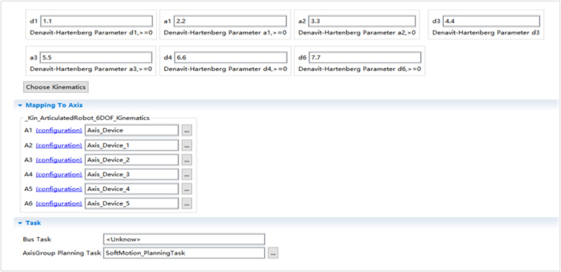
■ 可以方便的配置預定的運動學模型的軸組參數
■ 將機器人在不同坐標系下的位置坐標值整合為運動動作規劃
■ 函數庫和程序塊是基于PLCopen國際規范實現
■ 提供大量常用的運動學模型的支持
| Machine coordinate systerm (MCS) |
| Origin |
The intersection of axis 0 and the bottom of the robot |
| X | Points "foward" towards the tool center point |
| Y | Defined by X and 2 so that the MCS becomes right-handed |
| Z | Points upward |
在運動控制器上調試運動應用程序
可進行運動控制程序的編譯、下載和執行,將以最高性能狀態進行執行

額外的工具
■ POU可視化模板,便于在線操作和參數化
■ ACEPHERE允許通過實際控制應用程序,進而在開發環境中輕松地進行可視化運動
■ 可通過ACEPHERE開發環境調試運動應用程序(運動程序作為控制器的子任務運行)
運動控制的規劃和執行
根據PLCOpen for Motion Control國際規范,在ACEPHERE項目中建立運動控制功能塊(例如MC_Power, SMC_GroupPower, MC_MoveAbsolute或MC_MoveVelocity等)
POU的參數是IEC 61131-3變量,可以在運行時更改(例如通過邏輯應用程序或從用戶界面輸入)
單軸與多軸的運動控制
■ 使用可用的IEC函數和運動控制函數進行編程編程
■ 運動控制庫包括PLCopen規范中定義的單軸、多軸的運動學模型庫
■ 通過圖形化功能塊連線的方式編輯運動控制的邏輯應用程序
■ 特定的可視化模板,便于ACEPHERE開發環境的調試
行業應用